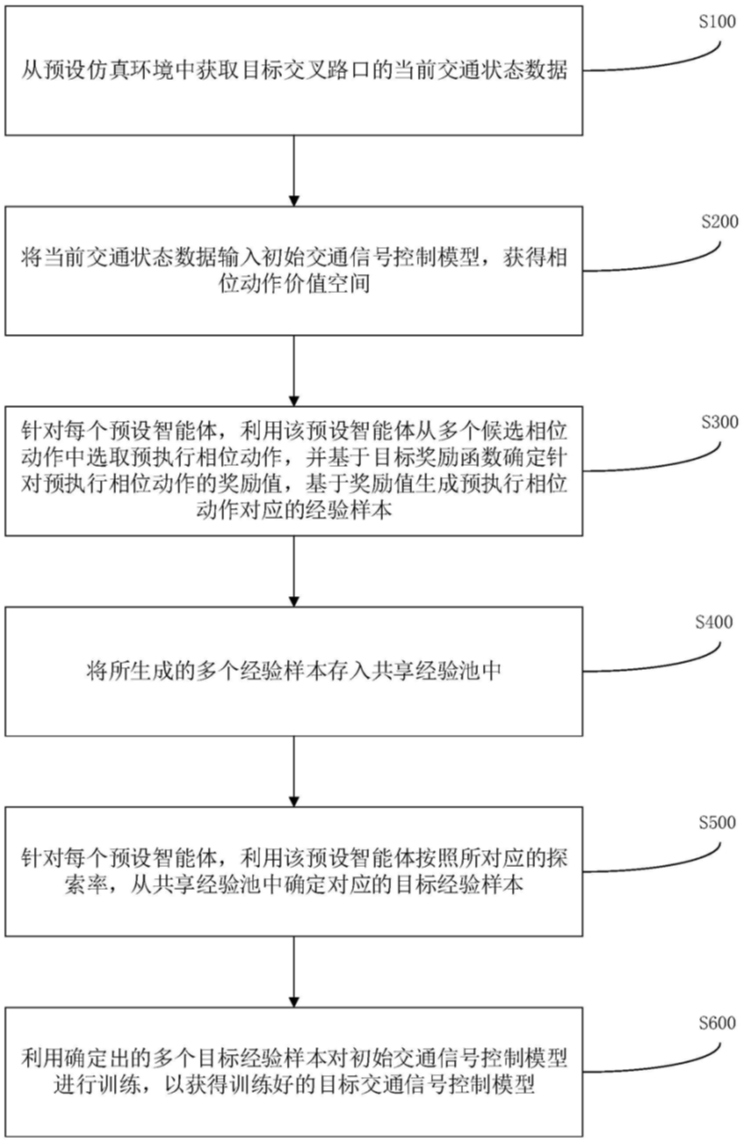
2022年4月25日,研究中心公开发明专利《交通信号控制模型的训练方法及交通信号控制方法》,该训练方法包括:从预设仿真环境中获取目标交叉路口的当前交通状态数据,将当前交通状态数据输入初始交通信号控制模型,获得相位动作价值空间;利用该预设智能体选取预执行相位动作,基于奖励值生成预执行相位动作对应的经验样本;针对每个预设智能体,利用该预设智能体按照所对应的探索率,从共享经验池中确定对应的目标经验样本;利用确定出的多个目标经验样本对初始交通信号控制模型进行训练,以获得训练好的目标交通信号控制模型。本申请通过,在训练过程中使用多个智能体对交通信号控制模型进行训练,减少了训练时间,从而提高了算法执行效率。